CAN总线
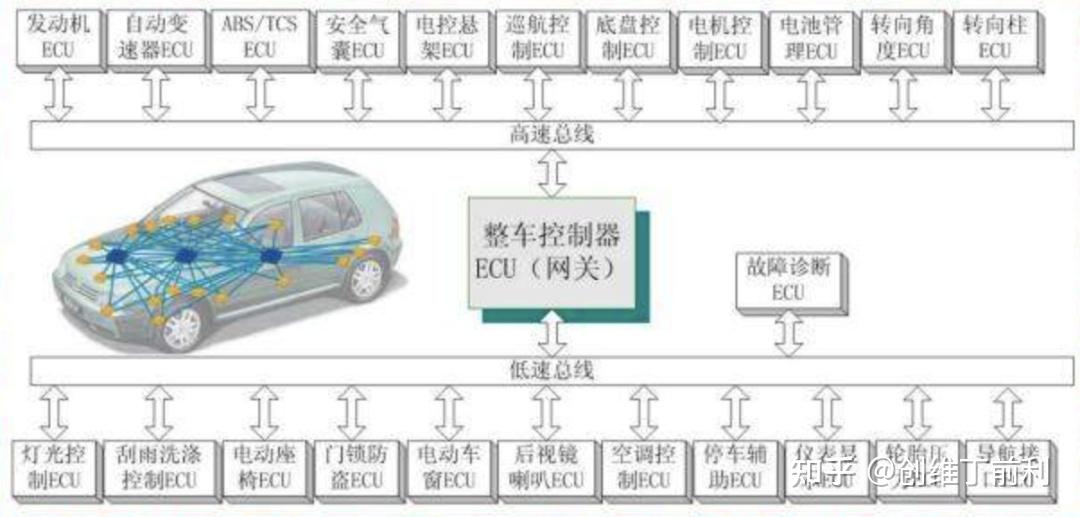
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低功耗、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN通过ISO11898及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
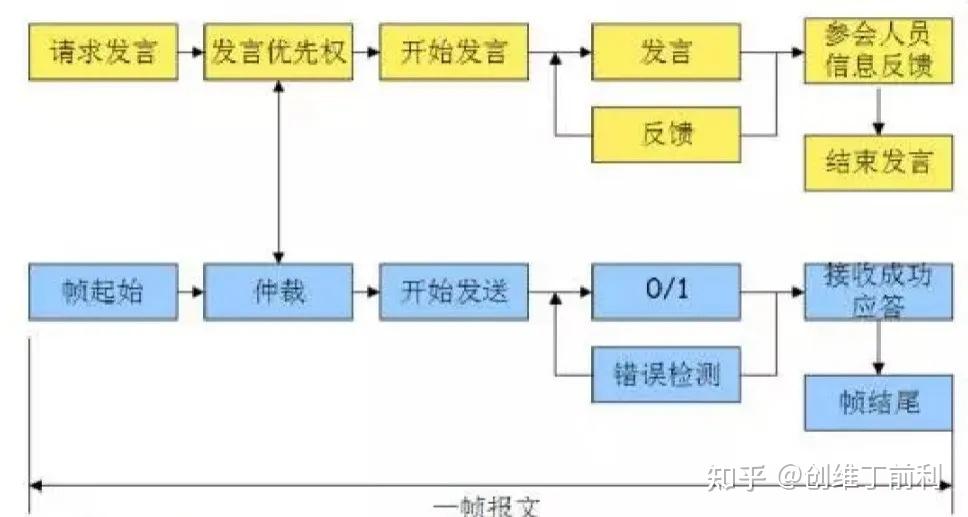
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。 CAN总线工作原理与其他总线一样,CAN总线的通信也是通过一种类似于“会议”的机制实现的,只不过会议的过程并不是由一方(节点)主导,而是每一个会议参加人员都可以自由的提出会议议题(多主通信模式)。


 发表于 2022-12-11 20:08:55
发表于 2022-12-11 20:08:55